Human-Robot-Interaction
Human–robot interaction is the study of interactions between humans and robots. It is often referred as HRI by researchers. Human–robot interaction is a multidisciplinary field with contributions from human–computer interaction, artificial intelligence, robotics, natural language understanding, design, and social sciences. A very closely related topic is industrial "cobotic". In the industry domain, robotic applications were always implemented by robotic experts. Now, a new trend is to propose a "cobot", which allows co-working with an operator in the same place (not dangerous if appropriate sensors are used to stop the robot in case of problem), and programming by the operator himself (by means of simple graphical tools). This is a conceptual revolution in industrial robotics with important cost reductions and simplifications and therefore new applications. HRI only makes sense if the endurance of robots can be combined with crafts and flexibilities of human beings.

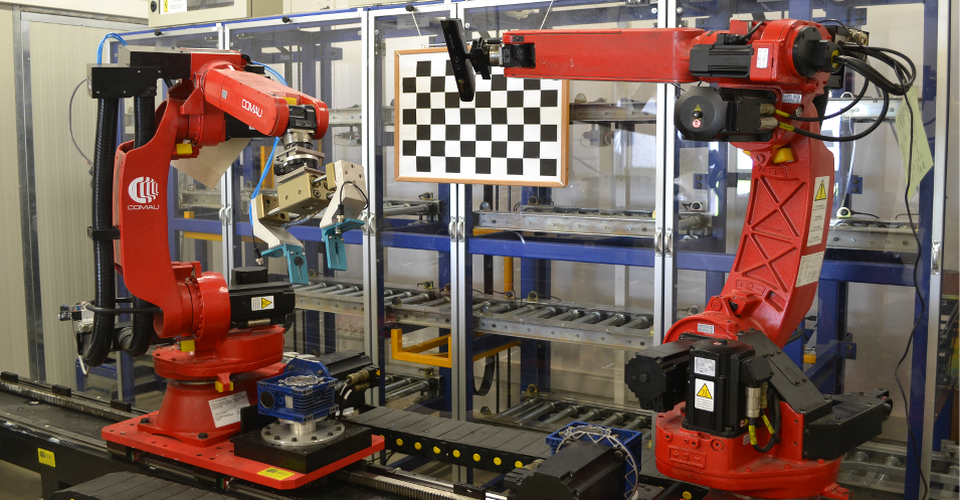
Control of cooperative manipulators
Among the biggest challenges facing robotics in the near future are those of cooperation robotics (multiple robots cooperating to perform a task) and collaborative robotics (robots and men who must work together to perform a task). Typical robotic work cells are mainly employed in the presence of high volumes of production, that can justify conspicuous investments of money and time: it is not unusual that setting up a painting cell for cars can take several days, hence the cell becomes convenient only if it will work for a long period of time in the same condition. On the other hand, in the world of small and medium enterprises (SMEs) processing of type "craft" on small volumes (to the limit, even on individual pieces) are often required. The objectives of the research project are the development of control solutions for multiple robotic systems in tight cooperation, also with human beings eventually to execute different task, and the focus is on industrial tasks that require explicit physical contact and exchange of forces between the robot and /or between robots and humans.
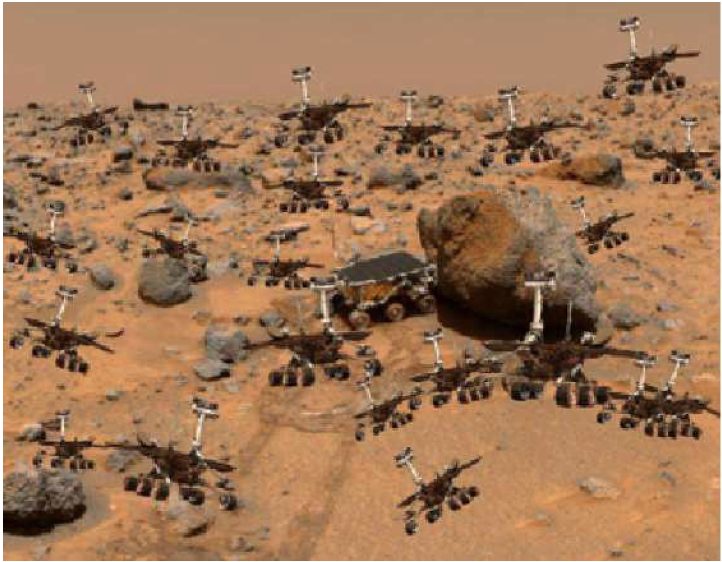
Control of multi-robot systems
Cooperation and coordination of multi-robot systems has been object of considerable research in the last decades. The reason behind this is that systems composed by multiple robots can achieve tasks more efficiently than a single robot or can accomplish tasks not executable by a single one. Moreover, multi-robot systems have advantages like increasing tolerance to possible vehicle fault, providing flexibility to the task execution or taking advantage of distributed sensing and actuation. Such systems can be used in many applications like, e.g., exploration of an unknown environment, navigation and formation control, demining, object transportation, up to playing team games (e.g., soccer). Within this framework, control laws for handling the intrinsic redundancy of these systems were designed and tested on several platforms constitued by underwater, mobile ground, marine surface and fixed-based robots.
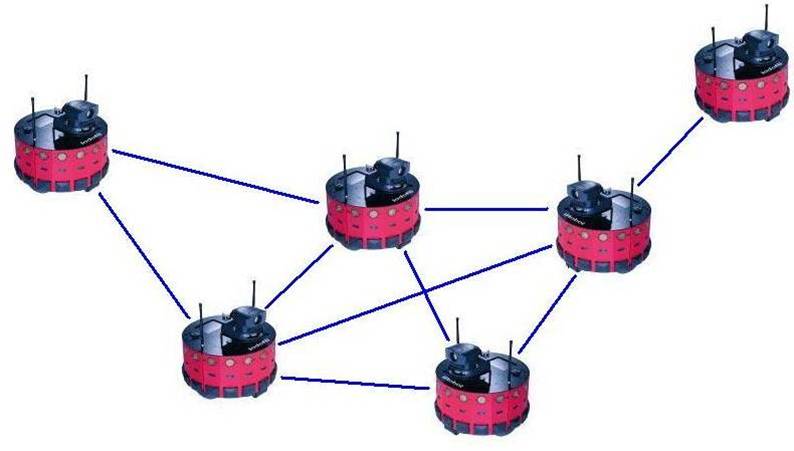
Distributed control of multi-agent systems
Applications involving multi-agent systems are day by day increasing, since they allow to accomplish complex tasks otherwise impossible for a single unit. Moreover, the system robustness to failures and reliability are potentially increased with respect to a single unit by distributing the tasks across the agents. A common approach to control such complex systems is the adoption of a central unit (centralized strategy), which may coincide with one teammate, able to collect the overall system information and compute the control input for all the agents. However, limited communication capabilities, for example in the case of robotic vehicles with a short communication range or a limited bandwidth, and limited computational power could make impossible the communication among all the agents and the adoption of a centralized strategy. Moreover, the central unit may represent a weak point for system reliability, since its failure may compromise the whole mission. Most recent approaches for controling these systemsl mainly focus on distributed or decentralized techniques for networked robots, where each robot has limited sensing and communication ranges and it can only use data from its onboard sensors or information received from its direct neighbours. In this case, the main control problem that has been faced concerns how to move the single robots using only local information and in order to achieve global tasks that may depend on the overall system configuration.
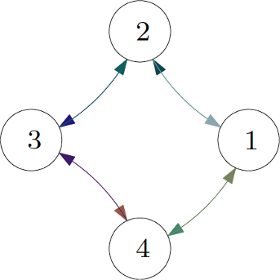
Fault detection and accomodation of distributed multi-robot systems
Thus, most recent research in the field of multi-robot systems focuses on the development of decentralized control strategies where each robot computes its own motion control only based on local information and on information from a subset of its teammates, usually named neighbors. Graph theoretical methods, that allow extracting analytical properties of the system on the base of the connectivity properties of the communication network formed by the agents, are often used to the purpose. In this context, one of the most popular problem is the consensus, that consists in reaching an agreement regarding a specific variable. The intrinsic redundancy of networked robots may allow to accomplish the assigned mission also in the case of failure of one or more teammates. Nevertheless, when dealing with distributed control of multi-robot systems aimed at achieving a global task, this feature, without the explicit adoption of a suitable Fault Detection and Isolation (FDI) schema, is only potential and the fault of one robot may jeopardize the proper execution of the task. In this framework, Distributed FDI algorithms for networked robots that allows each robot of the team to detect faults occurring on any other robot, even if not directly connected have been developed; this can be used in the case where the control input of each robot depends on the overall state of the system or on an estimate of it.
My main co-authors
- Gianluca Antonelli
- Fabrizio Caccavale
- Filippo Arrichiello
- Francesco Pierri
- Andrea Gasparri
- Pasquale Chiacchio
- Lynne E. Parker
- Luigi Villani
- A. Pedro Aguiar
- Antonio M. Pascoal
- Jolanda Coppola
- Francesco Basile
- Giuseppe Casalino
- Ing. Pasquale Cirillo, Ph.D
- Salvatore Pirozzi
- Ciro Natale
- Andrea Caiti
- Giovanni Indiveri
- Enrico Simetti
- Andrea Munafo
- Andrea Cirillo
